Adding Smarts to Environmental Sensors
投稿人:电子产品
2015-04-09
Today, environmental sensors must go well beyond their traditional role of detecting gases, monitoring humidity and barometric pressure, and counting particles in liquids in domains as diverse as hydrology, micrometeorology, and homeland security. Sensor fusion, in which information from multiple, diverse sensors are combined to take into account attributes of the environment surrounding these devices, now can enable perceptive inferences to be made about events and situations – the context within which sensors are operating.
For example, sensor fusion is playing a significant role in the growing wearables market. By combining traditional environmental sensors with other sensor devices, designers can develop smart systems that enable machines to interact with each other and the world around them. Information from gyroscopes, accelerometers, proximity sensors, ambient-light sensors and location sensors, combined with a wrist-worn pulse-rate sensor, can be used to deduce what a user is doing — running, walking, sleeping, etc., to execute a number of automated tasks.
Since users of wearables are continually in motion, their various activities influence the conditions sensors must operate within. A mobile device’s GPS may track a location, but it may also need to be aware that the user is now walking. The device must be able to constantly track the user from one environment to the next throughout the day, adjusting as the user moves from a home orientation to work, and back again.
Designing a wearable system for healthcare, fitness, and sports training is a complex undertaking. The integration of multiple sensor capabilities requires more in the way of security, reliability, and performance than a traditional stand-alone device. It also demands smaller packaging and diminished weight; it must be small enough to fit into tiny host devices, require very little in the way of power and processing and, of course, it has to be inexpensive. The underlying algorithms also must be able to adapt so that the sensors and the contexts within which they work can be reconfigured on the fly. Also important, they must feature high sensitivity and excellent noise immunity.
Distributed embedded-sensor technology has reached the point where it can enable the vision of pervasive monitoring of environments. However, one of the most important challenges that still needs to be overcome is the sensing uncertainty that arises from the time-variable (and unpredictable) nature of obstacles to sensing. A method being used to reduce the uncertainty factor in embedded-network sensing is called Networked Info-Mechanical Systems (NIMS), which suspends a network of wireless mobile and fixed sensor nodes in 3-D space. The result is run-time adaption using variable sensing location, perspective, and sensor types. Wide-range and precise actuation means that NIMS addresses some of the basic problems inherent in traditional static sensor networks such as:
- Adaptation to environmental dynamics and detection that is sustainable
- A reduction in sensing uncertainty
The use of NIMS adds new networking flexibility and functionality and new logistics for support of distributed sensors, and greater capacity for sensor self-awareness of their own sensing uncertainty, critical in context-awareness applications. NIMS provides the capability for actively adjusting sensing nodes, introducing diverse new sensors, and reducing wireless link path losses.
Sensor examples
Let’s now look at a few environmental sensors well-equipped to be used in sensor fusion and NIMS applications.
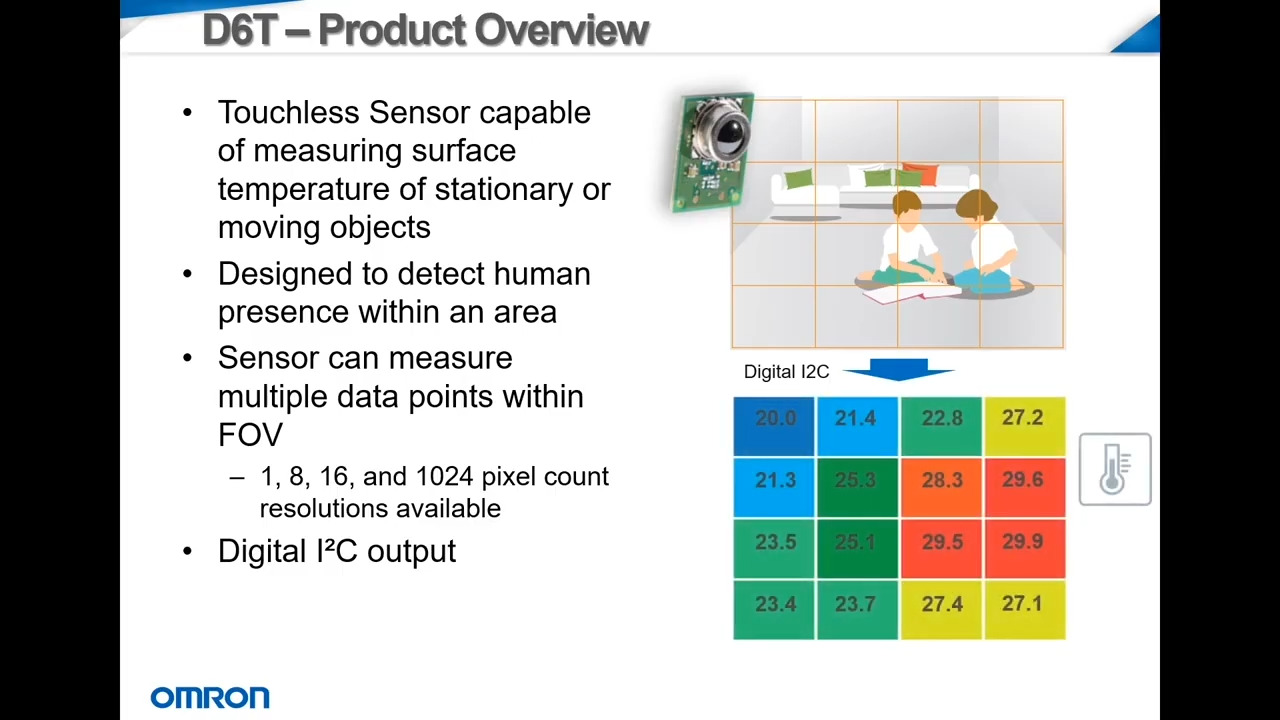
Omron’s D6T1 MEMS Thermal Sensors (Figure 1) feature sensitivity sufficient to enable the detection of a stationary human presence. It solves the pyro-electric sensor shortcoming of not being able to detect a stationary person since this method requires detection of signal change. Also, unlike pyro-electric models the D6T1 continues to detect the far-infrared emission of an object. To extend the detection distance from short range, improvements to the judgment accuracy can be made via software programming, considering time change, heat-source location, and human movement.

Figure 1: The OMRON D6T1 temperature sensor outperforms its pyro-electric competition.
The non-contact temperature sensor is comprised of a cap with silicon lens, MEMS thermopile sensor chips, and a dedicated analog circuit and logic circuit for converting to a digital temperature value on a single board through one connector. By mounting the signal-processing circuit closely to the sensor chip, a low-noise temperature measurement is realized.
In operation, the silicon lens collects radiated heat from an object onto the thermopile sensor in the module and the heat produces an electromotive force on the sensor. The analog circuit calculates the temperature of an object using the electromotive-force value and a measured-temperature value inside the module and the value is outputted through an I2C bus.
As an example of the integration of a digital color sensor, proximity sensor, and IR LED in an optical module with VDD I2C interface, consider the ams TMD3782x color sensor (Figure 2). The sensor delivers red, green, blue, and clear (RGBC) light sensing and proximity detection, detecting light intensity under a variety of lighting conditions. It performs color-temperature measurements, ambient-light sensing (ALS), and proximity detection with background-light rejection.

Figure 2: The TMD3782s color sensor block diagram.
The proximity detection feature allows a large range of operation for accurate distance detection, such as in a cell phone when the user positions the phone close to their ear. The color-sensing feature is useful in applications such as backlight control, solid-state lighting, reflected LED color sampler, or fluorescent-light color-temperature detection. The module reduces board space as well as design complexity and enables accurate color and ambient-light sensing under a variety of conditions. It also eliminates end-product factory calibration. Finally, its internal state machine puts the device into a low-power state between proximity and RGBC measurements for very-low-average power consumption.
Designed for such applications as wearables, medical, and mobile devices, the HDC1008YPAT by Texas Instruments (Figure 3) is a low-power, high-accuracy digital-humidity sensor with integrated temperature sensor. It provides excellent measurement accuracy and measures humidity based on the company’s novel capacitive sensor. Humidity and temperature sensors are factory calibrated.

Figure 3: Ideal for wearables, the HDC1008YPAT combines humidity and temperature sensing.
The device’s WLCSP (Wafer Level Chip Scale Package) is ultra compact, simplifying board design. The sensing element is placed on the bottom part of the device, which makes it more robust against dirt, dust, and other environmental contaminants. The device has a very small, 2 mm x 1.6 mm footprint and is functional within a -40°C to +125°C temperature range.
In summary
It’s safe to say that sensor fusion combinations will result in environmental sensors being used in many more applications going forward. As we have seen, context awareness requires that sensors have high accuracy and reliability, a small form-factor, low-power budget and, of course, reasonable cost of implementation. Several example sensors were presented that meet these requirements.
For more information about the sensors discussed in this article, use the links provided to access product pages on the Digi-Key website.
免责声明:各个作者和/或论坛参与者在本网站发表的观点、看法和意见不代表 DigiKey 的观点、看法和意见,也不代表 DigiKey 官方政策。